Wanneer je een dag / paar dagen weg gaat en je hond of kat is nog thuis. Kan het handig zijn om op afstand af en toe wat eten te laten vallen. Hier kan je lezen hoe je dit zelf kan maken.
Stap 1: Benodigdheden
- 5v stappenmotor met ULN2003
- Nodemcu esp8266
- Een aantal jumper cables
Stap 2: Software
De food dispenser wordt bestuurd door een (kleine) microcontroller met Wi-Fi. Er kan uiteraard ook een andere microcontroller worden gebruikt als bijvoorbeeld een ESP32 of een Arduino met ethernet shield
De omgeving waarin ik de Arduino firmware heb ontwikkeld is PlatformIO echter zou er ook een andere IDE voor kunnen worden gebruikt.
Om de food dispenser te laten verbinden met je Wi-Fi moet je de volgende regels code aanpassen in main.cpp:
const char* ssid = "SSID"; nconst char* password = "Password";
Zodra je de firmware hebt geflasht luistert de microcontroller op het ingestelde ip adres voor een get request genaamd /feedCat. Ook verwacht deze request een parameter genaamd "move" met de waarde die gelijk staat aan hoe ver het klepje open moet (dus hoeveel eten er uit de food dispenser komt). In mijn geval zou een request dan kunnen zijn:
http://192.168.2.55/feedCat?move=70
Hoe ver het klepje open zou moeten gaan zal even spelen zijn aangezien de grootte van de brokjes en de hoeveelheid eten die je wilt geven varieert.
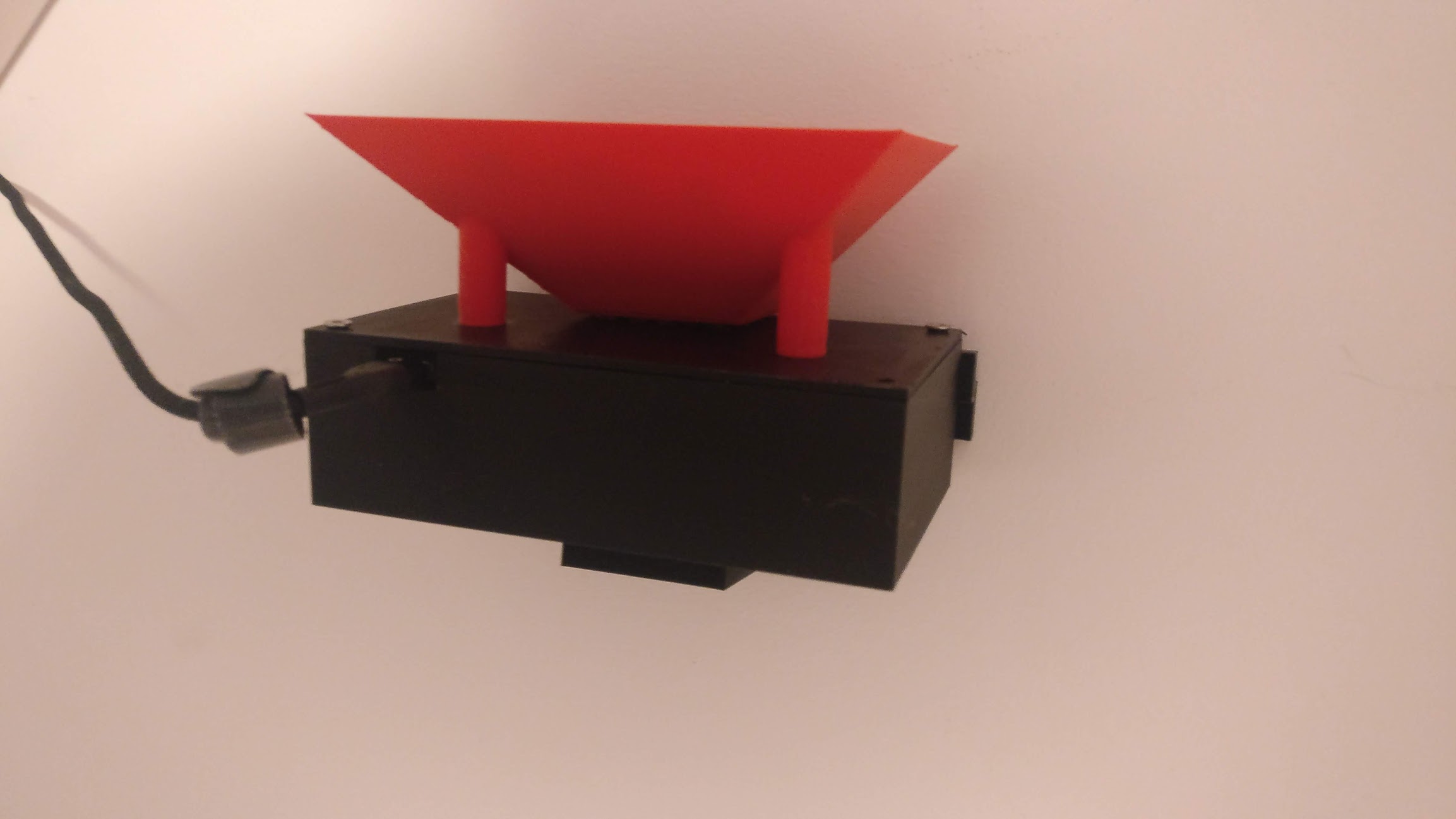
Stap 3: Behuizing
De behuizing in dit voorbeeld is geprint in PLA (Zwart en rood), echter zou het ook in andere materialen geprint kunnen worden. De STL bestanden hiervoor staan onderaan de pagina. De componenten kunnen met behulp van schroefdraad (welke ik heb vastgesmolten met een soldeerbout) en schroeven in elkaar worden gezet. Tevens heb ik er ook een wall-mount bij gemaakt zodat ik het bakje eenvoudig van de muur kan pakken om het bij te vullen.
Stap 4: Electronica
De Nodemcu moet op de volgende manier aan worden gesloten op de stepper motor:
- D1 -> IN1
- D2 -> IN2
- D5 -> IN3
- D6 -> IN4
- VU -> 5V +
- GND -> 5V -



